步进电机定位方式
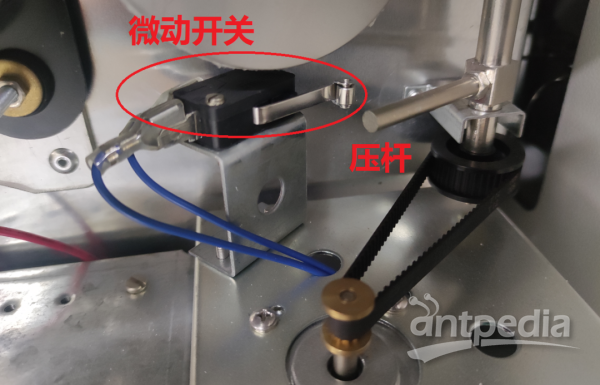
微动开关
步进电机的定位首先可以使用微动开关,这也是 EMI 上转动部件使用的方式,不赘述: ![[用于空间光学载荷步进电机定位的微动开关位置调整方法20201219安光所–检排(定稿确认).docx]]
使用微动开关定位步进电机的方式还在其他地方应用,例如:
气相色谱仪:
https://ibook.antpedia.com/x/611010.html
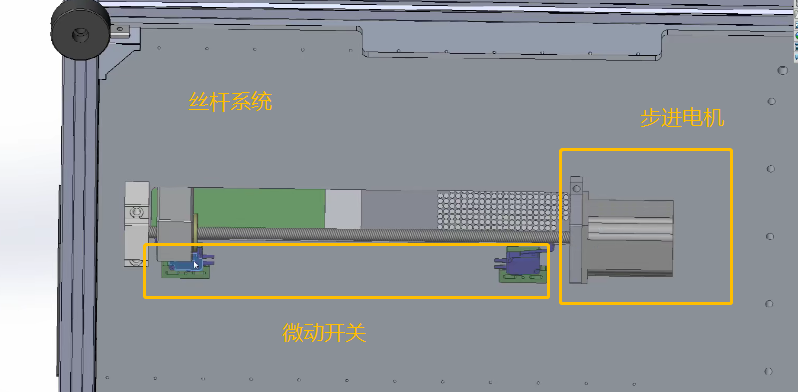
丝杆系统:
https://www.bilibili.com/video/BV1Nt411u7wi/
编码器
通常把可以把“步进电机+编码器”的组合成为一套伺服系统,编码器作为定位系统,如下图所示:
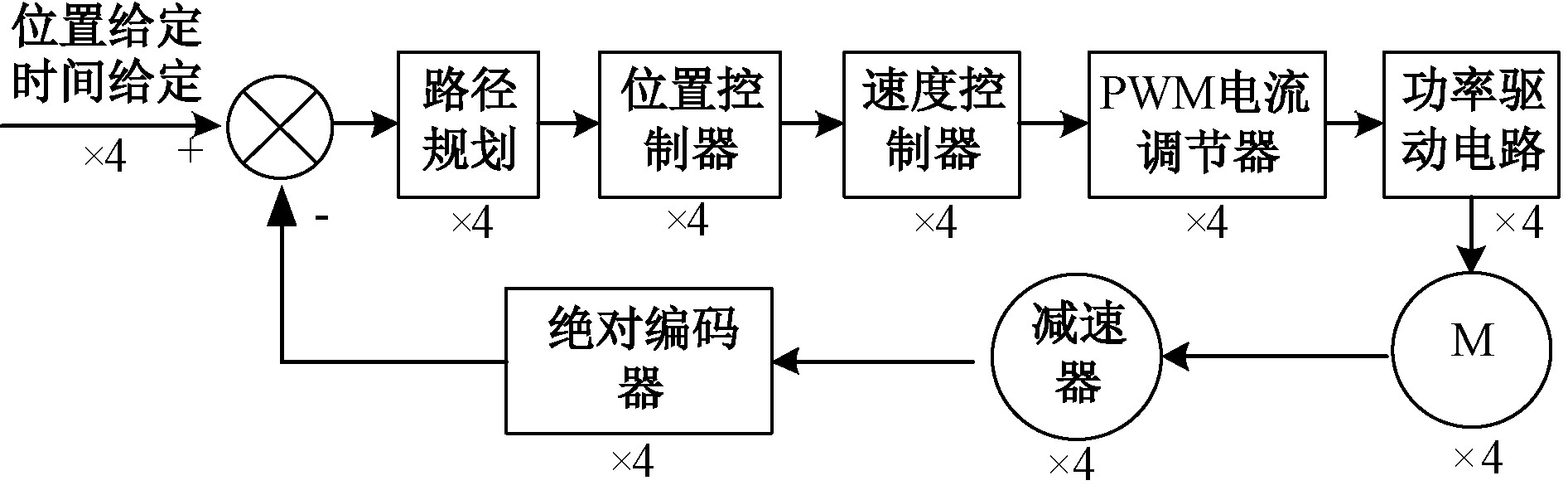
在 PID 控制中有所谓的伺服电机三环(电流、速度、位置): https://blog.csdn.net/reasonyuanrobot/article/details/96497025 其中速度环和位置环都依靠编码器结构。
[[步进电机以编码器定位]]
实时的图像
在某些应用里,可以直接使用拍摄到的图像进行反馈,对电机位置进行调节(似乎在天文中常使用):
(下图是 SVOM 地基设备的流程图)

[[步进电机以实时图像反馈定位]]
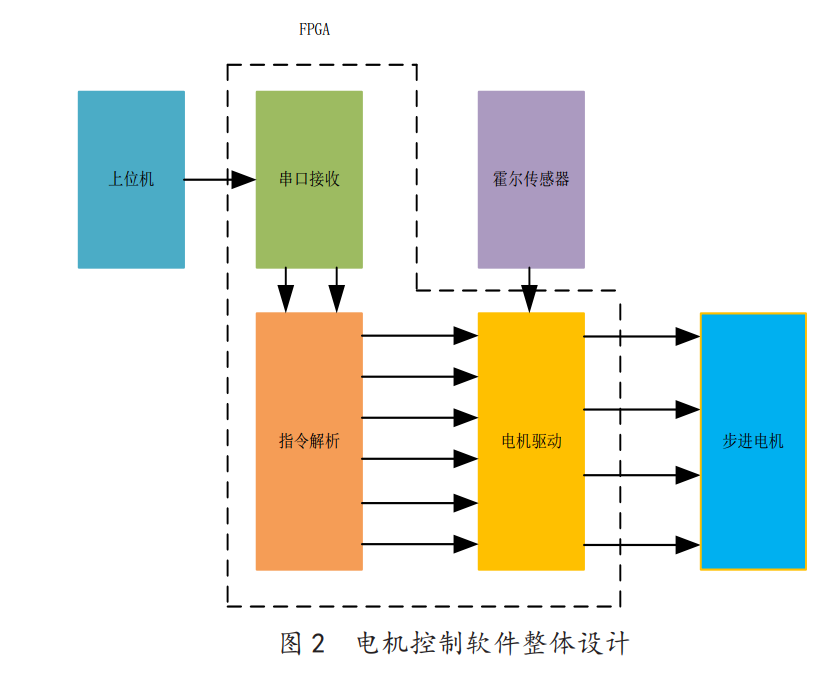
霍尔传感器
霍尔传感器可以作为定位(部分作为限位)的手段,在星上和地面都有使用,例如下图:
 [[步进电机以霍尔传感器定位]]
[[步进电机以霍尔传感器定位]]
#步进电机